
 起点课堂会员权益
起点课堂会员权益智能安防机器人概述
本篇文章主要关注基于安防任务的机器人,笔者为我们详细介绍了安防机器人的发展现状、类别以及它的技术难点。
安防行业是随着现代社会安全需求应运而生的产业。可以说,社会只要还有犯罪和不安定因素存在,安防行业就会存在并发展。事实证明,社会犯罪率往往并不因社会的发展、经济的繁荣而减少。
纵观安防行业发展历程,主要是围绕着视频监控在不断改革升级,至今共经历过五次变革,“看得到、看得远、看得清”一直是推动行业进步的主要因素。
自2015年AI技术的产品化引入,使得行业从被动监控向主动识别过度,“看得懂”成为了视频监控产品的主旋律;2016年、2017年通过国家大力建设和企业积极创新的共同作用,2018年智能安防行业进入快速落地阶段,科技开始真正赋能产业。随着自动驾驶技术相关产业链发展,安防行业机器人产品也开始不断在市场上涌现。
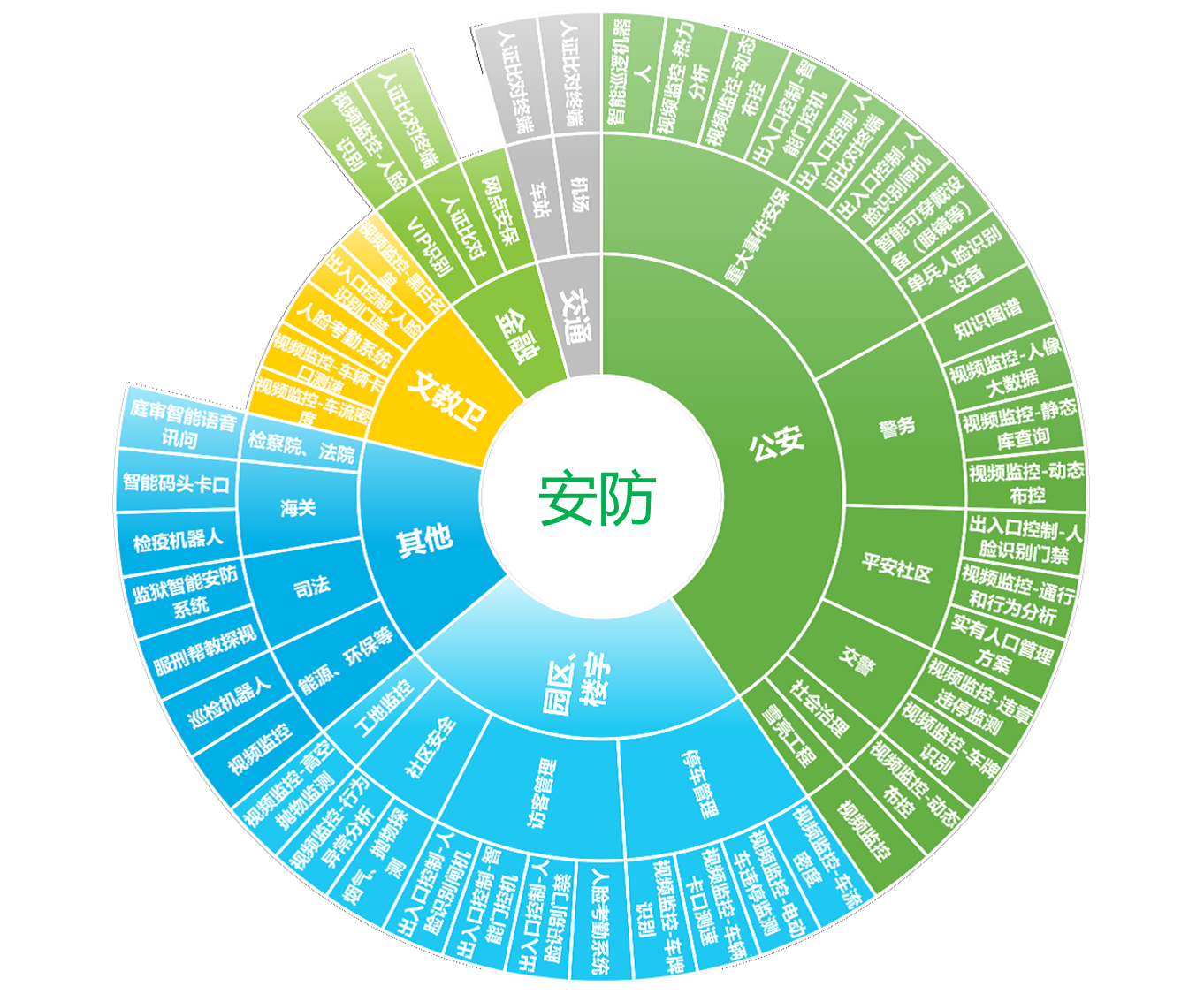
整体安防产业链如图所示:
安防机器人基本现状
从2013年起中国就已经成为了世界上最大机器人市场,未来10-15年有绝大可能仍将保持在这一位置。而在研发投入上,中国也下了不少力度。据IDC预测:2018年全球机器人和无人机解决方案的支出将达到1031亿美元,其中机器人技术支出将达到940亿美元,占整个2017-2021年预测支出的90%以上。
其中,工业机器人解决方案将占机器人支出的最大份额超过70%,其次是服务机器人和消费机器人。同时,中国拥有着机器人产业完整的产业链条,因此,守着亿万级的安防市场蛋糕,在国家天网工程和雪亮工程的大环境下,结合着中国机器人完善的产业链条,安防机器人可以说站在了产业和行业两个风口上。
具有巨大需求缺口的安防行业,似乎正成为服务机器人的新方向。安防机器人在一定程度上替代视频监控和安保人员,成为无人安防领域的一种选择。
在一些特殊作业领域,借助智能机器人的可以移动特征,可以有效监测环境中出现的异常情况。

举个示例:电力线巡检机器人,可以搭载红外温度传感摄像头,对整个作业区域的电力设备进行监测,一旦出现异常情况,上报告警至监控平台。
对电力设备的温度检测采用人工或者全线铺设广泛监测装置的方式,不是很好解决办法:人工巡检存在管理上风险,漏检、未检、巡检人身安全都是作业过程中存在的问题,全线铺设方式,一次投入的成本过大,变更场地不够灵活。
采用智能巡检机器人,可以柔性投入,机器人按照设定的巡检路线进行作业,不存在漏检、未检的风险。同时机器人能够全天候作业,按照巡检任务全勤进行线路监控。
安防机器人类别
安防智能机器人根据使用场景可分为,两种主要的场景:封闭环境、开放环境。

封闭环境的应用领域主要有:机房巡检(数据中心、电信机房等)、电商仓库、电力巡检(变电站、输配线路、核电站等)。
开放环境的应用领域主要有:轨道交通、景区、工业园区、住宅小区等。
应用在开放环境中巡检机器人对导航的精准度和专业检测、报警能力有更高要求。使用的机器人智能检测基础能力包括:烟火检测、高温告警、异常声音告警等;巡逻机器人因使用场景丰富,所以需求空间更大,由于需要暴露在开放的室外,所以对导航稳定性、流畅性,本体鲁棒性等方面有很大的要求。
巡检机器人完成的任务主要包括、人脸识别、人体检测、辆检测及识别、烟火检测、异常行为分析以及人证核验、语音交互与语义分析等。
技术及难点
智能安防机器人是实现主动安防的一次新突破,借助智能机器人的技术特征可达到巡检、巡逻、监控三者三位一体相辅相成。
智能安防机器人的核心技术包括本体的低速无人驾驶技术(由底盘技术、传感器组合和自主导航 SLAM 技术组成)、以计算机视觉为主的VSLAM技术、人工智能视频分析技术和网络传输、云平台管控相关技术。尤其是5G应用逐渐开始商用,将来智能巡检机器人借助5G特征可以完成更多任务。
在落地应用中安防智能机器人有两大技术难点,一是如何保证 SLAM 技术在动态导航中的稳定性和准确性;二是如何保证在光照强弱不一、恶劣天气情况,以及多移动目标等复杂场景下,机器智能技术的可用性。
![]()
目前智能安防机器人还无法实现自学、自理、自决 等完全智能的能力, 但已经具备了目标检测、物体识别、环境感知、多模态交互等基本的分析判定功能,未来相关技术的突破还有赖于学术成果落地,以及市场的实际需求的推动。
安防智能机器人系统构成包括机器人硬件、网络系统、机器人云平台、 可拓展设备,以及充电装置 。其中机器人本体近年来不断增加边缘计算能力,多采用 CPU+GPU 的芯片模式;网络传输方面多为视频传输需求和命令控制类要求,使用包括 WiFi 、移动互联网(4G、5G)、BLE通信、LoRA等多渠道传输。
云平台主要作用是多机器人管理调度、应急控制、业务处理、视频分析、数据报表、安全态势分析、第三方数据平台接入等,是开放性合作的重要载体。安防智能机器人在落地部署方面 主要包括 机器人运行环境勘察 、 制定网络部署方案 、 制定机器人巡检 巡逻方案 、 机器人建图 ,以及机器人巡检巡逻路径 和 工作目标设定 。

目前智能安防机器系统尚且不是很完善:前期部署需要较多的成本投入,实际交付中对技术支持团队的要求较高,需要技术支持人员对机器人的各项功能,对各类网络特性,技术团队对工程实施能够熟悉掌握。
针对不同的行业特征,所需要了解的部署方式不同,要求机器人公司有比较深刻的行业洞察,未来随着机器人整体系统的完善稳定化,部署过程会越来越简单。
本文由@笑笑生 原创发布于人人都是产品经理,未经许可,禁止转载。
题图来自Unsplash, 基于CC0协议。









厉害了,最原始的资料出处被你发现了
纠正一个错误,元器件标注图片中,激光雷达标注错误,应该是超声,用于检测正前方障碍物的;而激光雷达应该在激光导航模块中
另外途中的机器人轮子没有悬架设计,转弯的时候只能靠四轮原地转动,这种方式会对轮胎造成严重磨损
看来是行内人啊,确实标注错误。不过轮式机器人目前设计方式通常都是差速轮原地旋转方式。为了降低结构上的设计难度,同时用差速原地转圈可以实现狭窄通道原地掉头,控制方面也比较容易实现。