
 起点课堂会员权益
起点课堂会员权益机器人任务设计要素
一款智能机器人产品从idea到完成设计的整个过程,大致包含五个模块,其中软件、硬件、算法是对产品能力在不同维度的的详细分解,那么在面向用户时,机器人产品能力是以何种方式体现的呢?本文作者对智能机器人产品的任务设计要素进行了分析,一起来看一下吧。

在谈机器人任务设计之前,我们先简单了解下一款智能机器人产品从idea到完成设计(这里不讲生产)的整个过程,整个过程大致会包含五个模块:产品价值定义、产品能力定义、硬件产品设计、软件产品设计和算法模块定义。
1)产品价值定义
产品价值定义可以从两个方面进行定义,一方面是用户侧,主要进行用户定位、用户需求的定义;另一方面是公司侧,主要是市场定位、公司需求的定义。
2)产品能力的定义
产品能力的定义,一般包含基础能力的定义和价值能力的定义;基础能力即指当前行业的产品必须具备的基本能力,可以从竞品调研分析或市场分析报告等渠道获取;价值能力的定义依赖于上一步产品价值的定义,价值能力服务于产品价值,核心是满足用户和公司的需求,也是体现产品差异化的重要因素。
3)硬件产品定义
硬件产品的定义,主要包含ID设计、结构设计、元器件规格选型等方面;产品能力的实现依赖于产品硬件,硬件产品的定义即是对产品能力所需的硬件部分进行的详细分解。
4)软件产品定义
软件产品的定义,主要包含业务流程设计、UI设计、功能说明等方面;作为一款智能机器人产品,其核心当然是硬件产品部分,软件产品辅助硬件产品为用户提供更好的体验,更好地满足用户的需求。
5)算法模块的定义
算法模块的定义:主要包含算法的运用场景、目的、要求。算法、软件、硬件共同诠释机器人的产品能力,算法能力定义着“智能机器人”产品中的“智能”部分,算法能力的好坏往往决定着一款智能机器人产品到底是一个笨拙的玩具还是一款超出用户预期的“机器人”。

一、机器人任务设计要素
前面简单介绍了一款智能机器人产品从idea到完成设计的整个过程,其中软件、硬件、算法是对产品能力在不同维度的的详细分解,那么在面向用户时,机器人产品能力是以何种方式体现的呢?
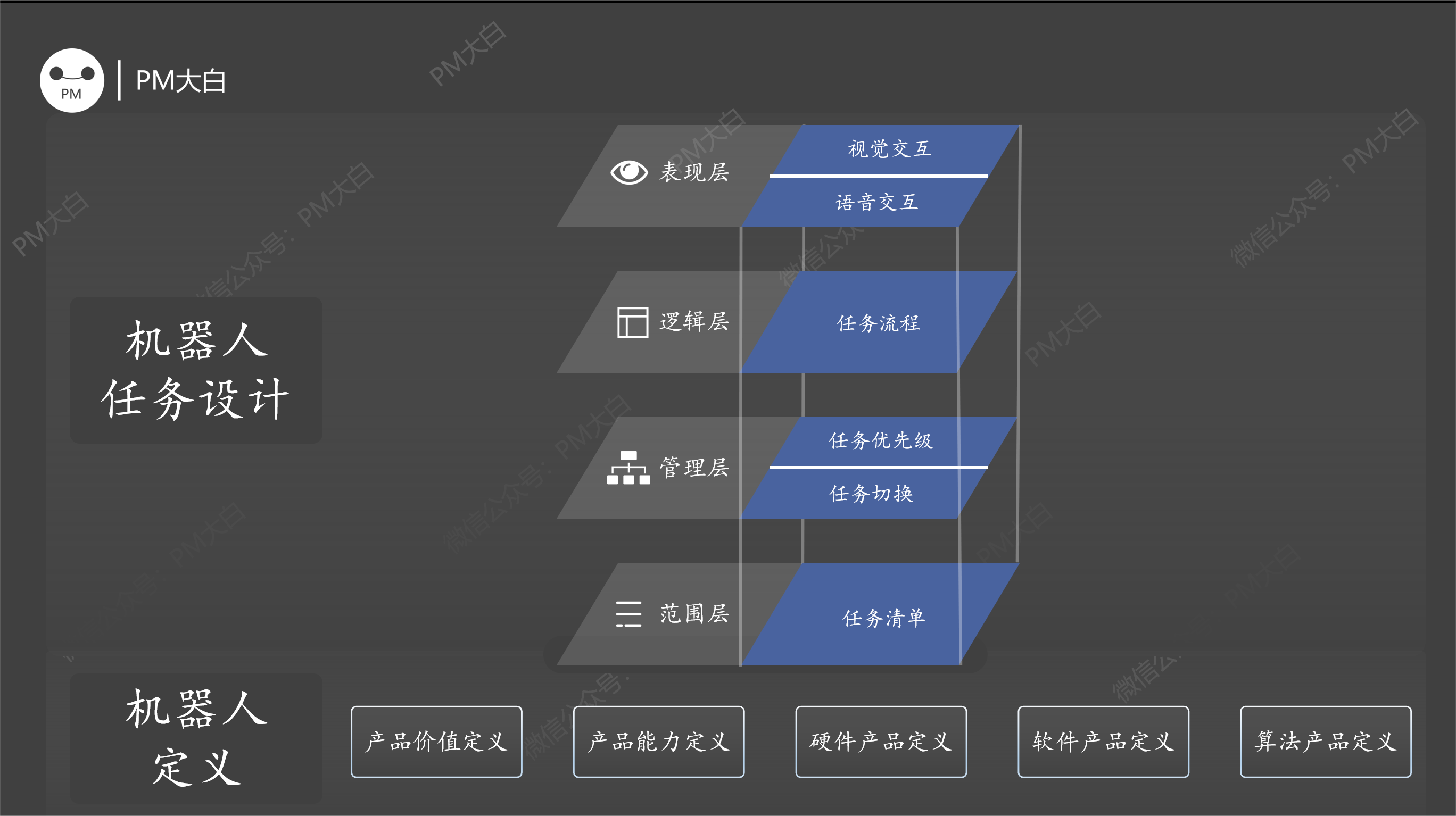
答案是“任务”,所以机器人的任务设计尤为关键,根据个人对机器人任务设计的理解以及最近对工作中一些经验的总结,机器人的任务设计主要包含4个层面:
- 任务范围层:机器人能力边界的框定。
- 任务管理层:机器人不同任务之间逻辑关系的定义。
- 任务逻辑层:机器人具体一个任务在执行时内部完整逻辑的定义。
- 任务表现层:机器人在执行任务时,用户看到的、听到的、感受到的机器人的各种外在的表现。
1. 任务范围层
机器人的能力是通过一个一个任务来呈现到用户面前的,机器人的任务清单需要覆盖机器人运行时的所有场景,就像产品经理在设计软件业务流程时需要穷尽用户在下载软件后的各种场景一样。
2. 任务管理层
任务之间逻辑关系的定义和管理,就好比任务的管理中心一样,在什么场景下哪一种或多种任务同时启动,在什么场景下哪些任务需要结束;以及定义清楚所有任务在执行过程中可调用的通用逻辑(有点类似任务中台)。
1)任务触发类型:APP触发、语音触发、场景触发、定时触发。
2)任务分类:基础功能,业务功能。
3)任务切换:任务正常触发、任务冲突中断、任务无法完成自动结束、任务完成后自动结束。
4)任务关系:任务与任务间的关系定义;任务优先级、任务并行、任务互斥、任务串行规则的定义。
5)任务隔离:通过机器人的不同模式将任务人为进行隔离,不同模式下只能执行对应模式下的任务清单;类似机器人的工程模式、设置模式、升级模式、检修模式(自检模式、手动检修模式)和工作模式等,即是人为对对机器人的任务进行了一个分组和隔离,不同模式的前提下只能执行相应的任务清单。
3. 任务逻辑层
任务内部的完整逻辑描述,描述具体一个任务从触发到结束整个过程中的遇到每一个细节(场景),以及机器人对每一个细节的处理和交互。
1)任务触发:任务的触发条件和触发方式。
2)任务过程:任务执行过程中分哪几个阶段,每个阶段执行的具体流程。
3)任务中断:在任务启动后,任务中断的因素有哪些,中断后如何交互。
4)任务完成:任务完成的标志。
4. 任务表现层
机器人在执行任务的过程中,对各种环境的反应,其中包括机器人内部的环境和机器人外部周围的环境,机器人做出的交互反应类型主要包含:视觉交互、语音交互、灯效交互、移动交互、姿势交互。
二、机器人任务设计要素应用
上面已经介绍了机器人任务设计的四要素,以及机器人任务设计的重要性和方法,只讲方法论不讲实际应用那是耍流氓,下面给大家介绍一个智能机器人的具体任务设计过程:这里我们就拿最基本的[返程充电]任务来说事。
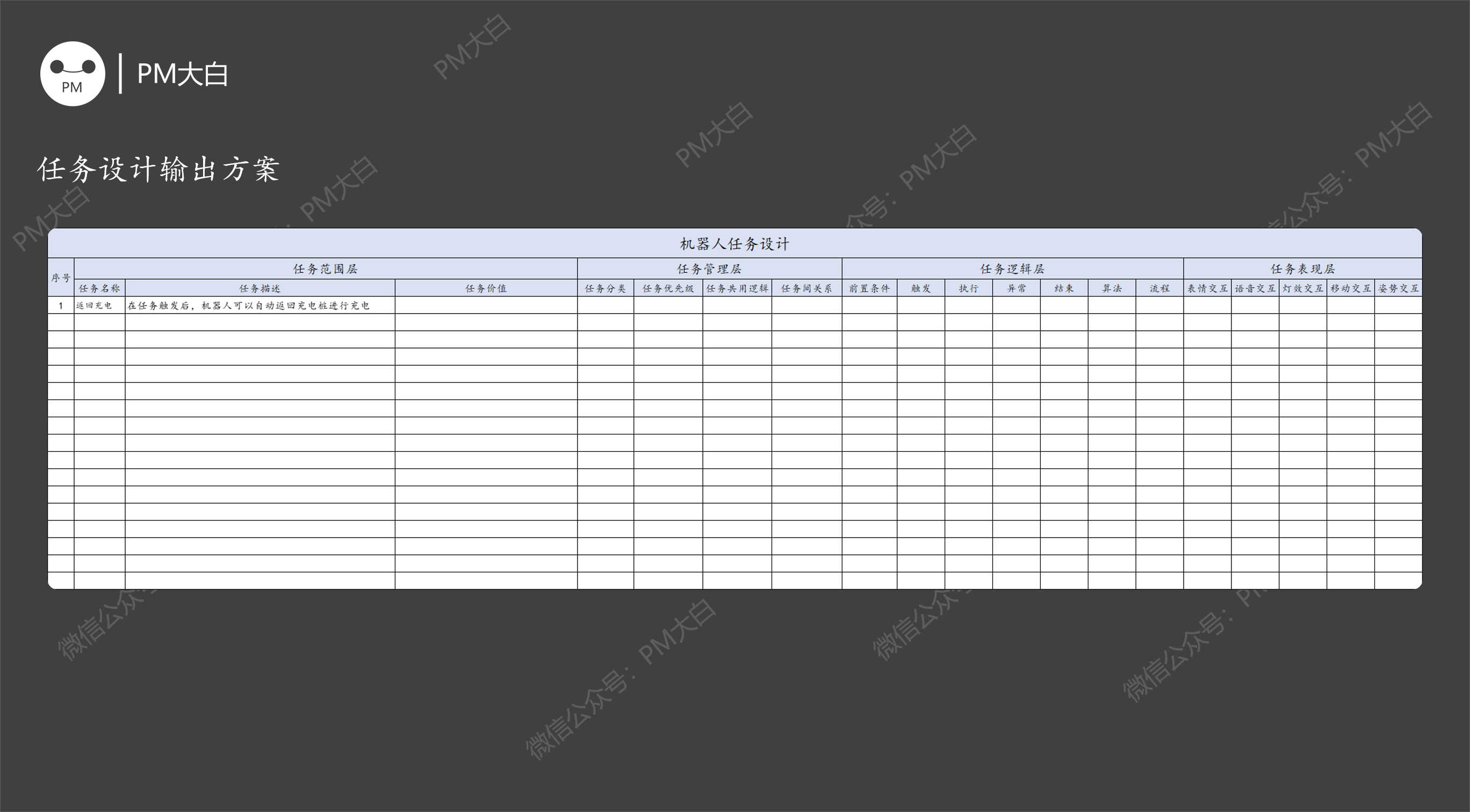
1. [充电任务]定义(范围层)
1)任务名称:返回充电。
2)任务描述:在任务触发后,机器人可以自动返回充电桩进行充电。
3)任务价值:体现小丫的智能性,提升用户体验。
2. [充电任务] 与其他任务间的关系(管理层)
1)任务分类:基础任务。
2)任务优先级:5(高);没有该功能会导致用户体验急剧下降。
3)任务公用逻辑:指令识别判断逻辑、任务冲突判断逻辑、移动受阻判断逻辑。
4)任务公用流程:唤醒流程、导航流程、重定位流程。
3. [充电任务] 的执行逻辑(逻辑层)
1)前置条件:工作模式下+已完成建图+未在充电+当前没有其他优先级更高的任务正在执行。
2)触发条件
- APP触发:用户通过手机一键下达【回去充电】任务。
- 语音触发:用户通过语音指令词【回去充电】触发。
- 场景触发:机器电量降低至X%时,自动结束当前任务,开始执行“返回充电”任务。
3)执行
- 寻找充电桩:获取充电桩在地图上的位置信息。
- 路径规划:规划当前机器人所在位置与充电桩两点之间的最佳移动路线。
- 移动过程:避障(遇到障碍物)、重定位(定位丢失)、移动受阻(无法移动)。
- 对桩过程:寻找充电桩、对桩成功、对桩失败。
- 充电成功:接通电源。
4)异常
- 导航:无法避障、定位丢失、路线规划失败、移动受阻。
- 对桩:无法找到充电桩、对桩失败。
- 充电:无法接通电源。
5)结束
- 任务未完成结束:APP操控结束、结束任务指令、电量=0结束、长时间对桩失败导致任务结束、无法接通电源导致任务结束。
- 任务正常结束:接通电源任务完成,[返回充电]任务结束。
6)算法:在[返程充电]任务中应用到导航算法。
7)流程(见图)
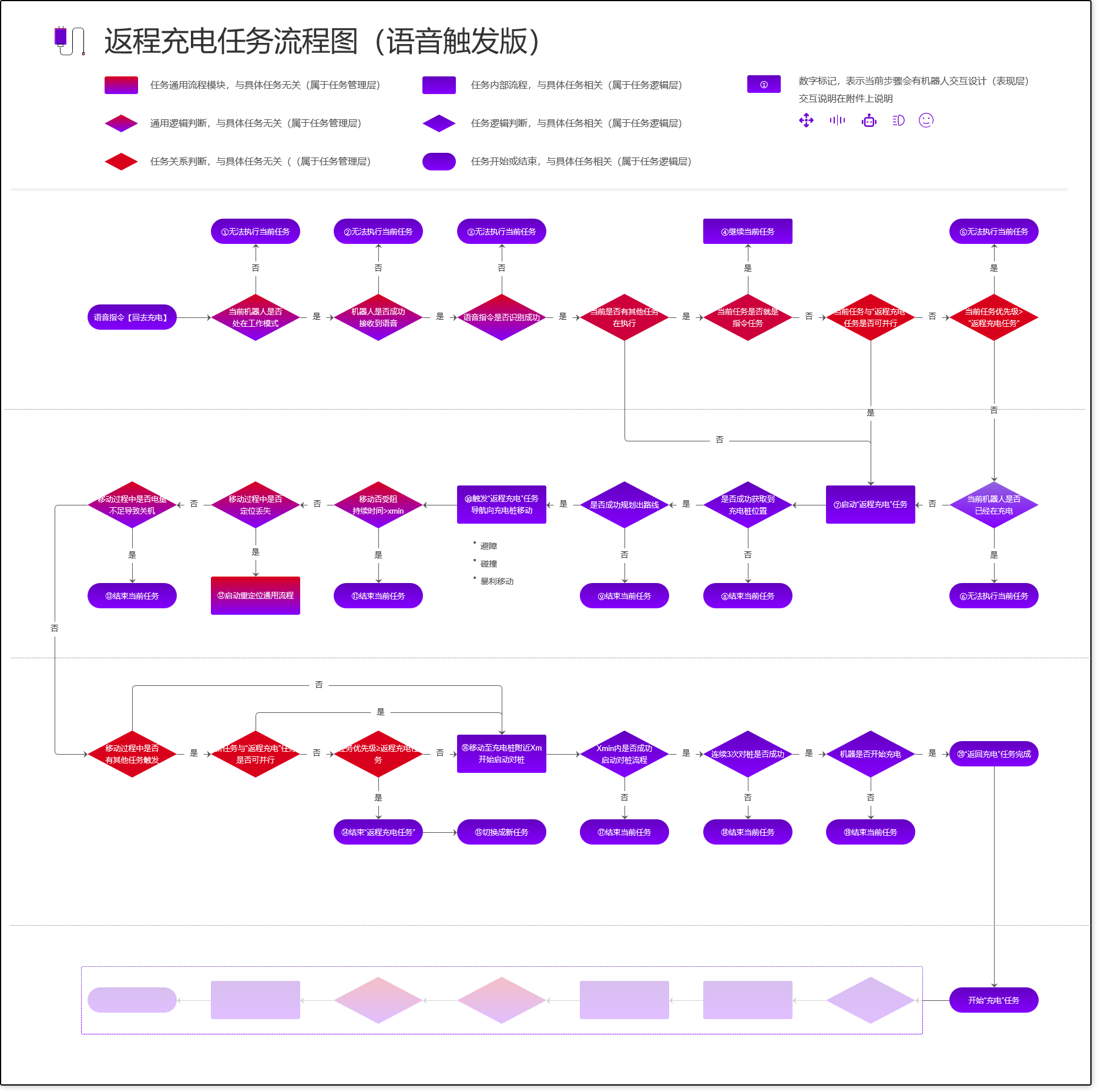
4. [充电任务] 在执行过程中的交互设计(表现层)
流程图中所有用数字标记的步骤均可以设置机器人的交互反馈(①②③……),根据 [返程充电] 任务流程的设计,其中交互设计可以分为以下四个阶段:
- 触发时的交互
- 移动中的交互(执行任务过程中)
- 对桩时的交互(执行任务过程中)
- 完成任务时的交互
流程图中的“⑦启动返程充电任务”点的交互可以设计为:
- 语音:大白要回家充电啦,主人待会见咯~么么哒。
- 灯效:常规亮度、波浪状、持续3个波浪(之后恢复至移动时的默认灯效状态)。
- 表情:显示大白机器人奔向充电桩的动画,持续5s(之后恢复至移动时的默认的移动表情)。
- 姿势:姿势恢复到默认状态。
- 移动:移动速度按照Xm/s移动。
三、总结
任务可以说是机器人产品的最小价值性单位,用户可以因为机器人具有某一个特别的任务能力,而去购买它,也会因为机器人无法执行某种任务,而放弃购买或者遗弃它。
任务往上聚集可以形组合成机器人的各种功能模式(工作模式、工程模式、自检模式、设置模式……)和服务模式(回家模式、离家模式、关怀模式……),向下分解可以分解出各种流程组件和状态。
机器人的产品价值、软件能力、硬件能力、算法能力均需要通过机器人在现实场景中能完成的任务来呈现给用户,SO机器人的任务设计尤为重要。希望本文的机器人任务设计方法对大家有用~
青花瓷中水泡葱,老板叫你去敲钟!
好了,就写到这吧~
专栏作家
andy,微信公众号:PM大白,一名产品经理行业的小兽医
本文原创发布于人人都是产品经理。未经许可,禁止转载
题图来自 unsplash,基于 CC0 协议
该文观点仅代表作者本人,人人都是产品经理平台仅提供信息存储空间服务。









写的很棒,赞
正好最近在做一款封闭场景下的大型无人清洗车辆,觉得作者写的观点确实很实用!现在一直在考虑怎么优化任务的交互😂😂
文章看着真带劲,看完以后没有任何疑问点,棒呆~
下次整点悬念的,不然留不住观众啊😂