
 起点课堂会员权益
起点课堂会员权益智能座舱的影分身术:Hypervisor(二)
本文分析了汽车电子需要的Hypervisor、Hypervisor方案的技术反思、Hypervisor技术使用的必要性以及Hypervisor对SoC的选择的影响。

接着智能座舱的影分身术:Hypervisor(一)的概念讲解,我们说明一下实际Hypervisor的进一步思考。
一、汽车电子需要什么样的Hypervisor
1. 安全要求
- 虚拟机系统设计需要达到ASIL B的安全等级。
- 硬件的系统隔离和安全系统。
- 安全模式启动
服务质量保证的高优先级任务性能水平。
2. 功能要求
- 多操作系统支持(Linux、Android、RTOS,QNX)
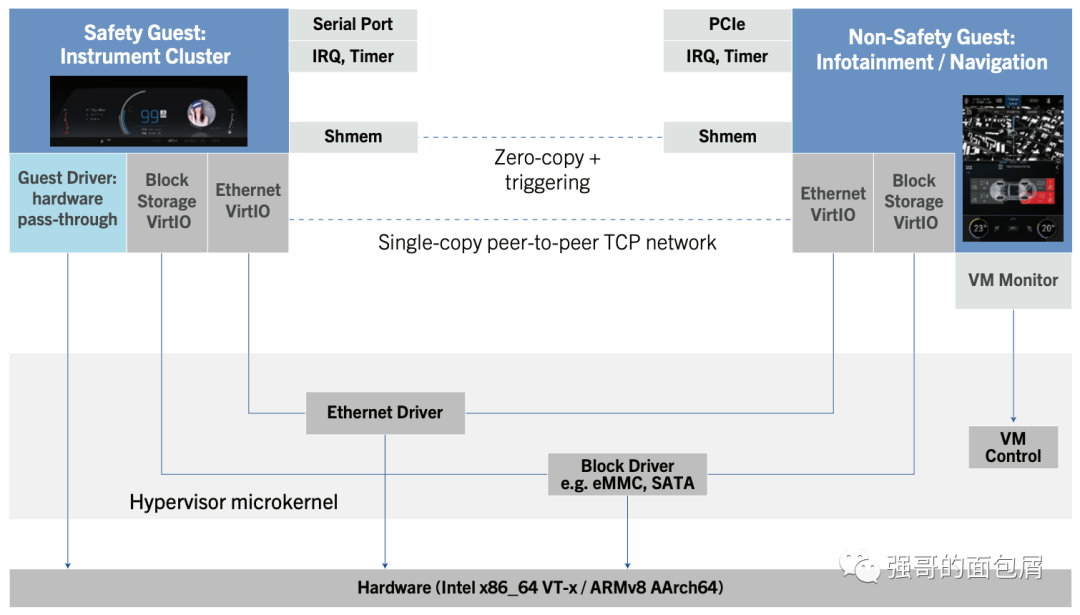
- 具备多屏互动的高效解决方案
- 图形图像加速的能力
- 系统快速启动与优化
- 启动画面显示显示
- 软件硬件分离
3. 接口标准
- 故障监视与诊断处理
- 优先级和调度策略
- 共享内存与进程间通信
- 半虚拟化设备的标准接口
- 透传的IO优化策略
二、Hypervisor方案的技术反思
我们对比一下各个Hypervisor厂商的宣传的技术的优势。
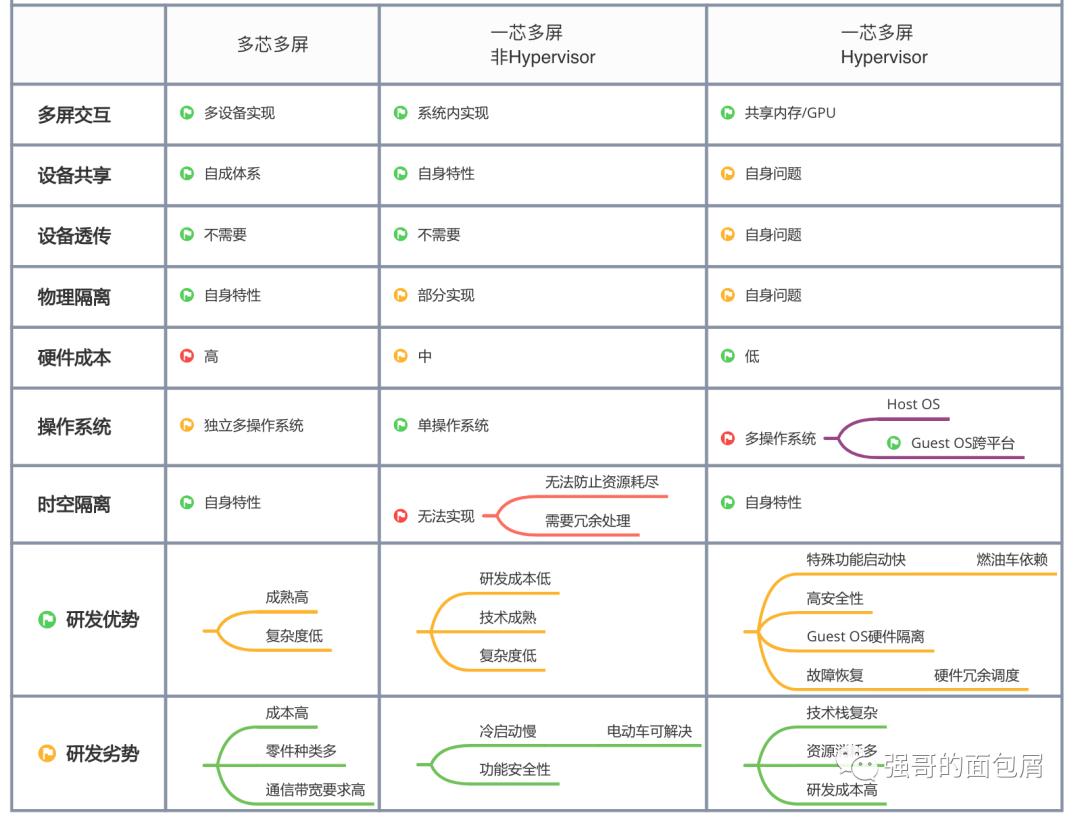
如果不考虑成本优势的话,在分布式电子电气架构下,Hypervisor厂商所宣传的虚拟化优势,都不是优势而是问题。
Hyperviosr技术在冗余算力调用,故障恢复方向有所成就,但是按汽车功能安全要求来说,原有的产品也是满足这些需求的。
三、一定要用Hypervisor技术吗
Hypervisor能省钱,灵活性上有所增强,是不是座舱一定要用Hypervisor技术?
回答:不一定。
拿Tesla Model3作一个例子,这个例子并不极端,在多个屏幕的状态下依然有效(由于不了解细节,我们这里的方案都是假想)。
智能座舱应用假设包含仪表、IVI、ADAS,显示输出一个屏幕。
在同样的成本条件下,我们有多处可行的解决方案:
- 方案1:Linux虚拟机方案,运行多个虚拟化系统,由仪表管理GPU,统一输出到屏幕。
- 方案2:单Linux方案,运行一个系统,保证ASIL B级别,单一输出。
- 方案3:轻量级虚拟化,考虑方案2可能存在的问题,可以在操作系统层进行虚拟化,采用容器技术虚拟化,保证仪表、自动驾驶的资源优先保证。
针对低功耗需求、启动需求、电源管理需求单独考虑。
为什么依然推荐使用Hypervisor技术?
回答:
- 软件硬分离带来的好处理。
- 与世界的进程保持同步。
虽然某些情况下,不使用虚拟化技术我们一样能解决问题,为什么还推荐使用Hypervisor技术?
回答:
- Hypervisor带来的性能、资源的开销很小。
- Hypervisor对错误处理、故障处理带来的冗余。
- Hypervisor对硬件的隔离,有利用硬件的更新迭代。
- Hypervisor是行业发展的整体选择,独立开辟、维护一条技术协议栈终将落后,除非你象Tesla一样有创造力,有控制力,有克制力。
举个历史故事:
自动驾驶发展史上,人们最初希望通过对道路的改造,比如铺设磁铁,来完成车辆自动驾驶。
探索很多年之后,所有的尝试都失败了。直到深度学习的发展重新为人类指明了自动驾驶的发展方向。
如果当初有人选择了深度学习的方向,自动驾驶会更快的到来吗?
几乎不会,因为个体选择的进步要等待时代。同样,今天如果选择5G作为实现自动驾驶的核心,那也会完蛋。
座舱还是选择Hypervisor好,以后麻烦少。
四、Hypervisor对SoC的选择有什么影响
SoC的选择与Hypervisor的选择是互相影响的,因为不是所有的SoC对所有的虚拟机都作过优化。
由于Hypervisor方案涉及到CPU、GPU的虚拟化,半虚拟化解决方案涉及到对上层OS的修改,完全虚拟化涉及到各个CPU的资源分配调用。汽车领域使用虚拟化技术依然需要SoC厂商与Hypervisor厂商共同的支持来进行优化。
- QNX支持IMX8系统、高通820A系列、SA6155/8155、瑞萨RCar系列;
- Global Hypervisor支持TI J6、瑞萨RCar系列、Intel Apollo系统;
- MTK、Autochips等公司都是基于Xen来完善与支持虚拟化技术。
当我们选择了SoC,或者选择了Hypervisor方案的时候,我们对另一部件的选择,甚至对上层OS采用QNX还是Linux其实也一样做出了选择。
作者:updatedb;公众号:强哥的面包屑 / MyCrumbs。
本文由 @updatedb 原创发布于人人都是产品经理。未经许可,禁止转载
题图来自Unsplash,基于CC0协议









作者做过hypervisor座舱与单独控制器的具体成本对比吗?例如研发费用及单件成本。