
 起点课堂会员权益
起点课堂会员权益无人驾驶领域的AI PM都应该了解:高精地图行业报告

高精度地图作为自动驾驶的必要支撑,必须维持底层车道数据的精确性,同时必须能够进行动态路况信息的实时更新,并基于不同车主驾驶习惯进行个性化驾驶支撑。本文是关于高精地图的行业报告,一起来看看~
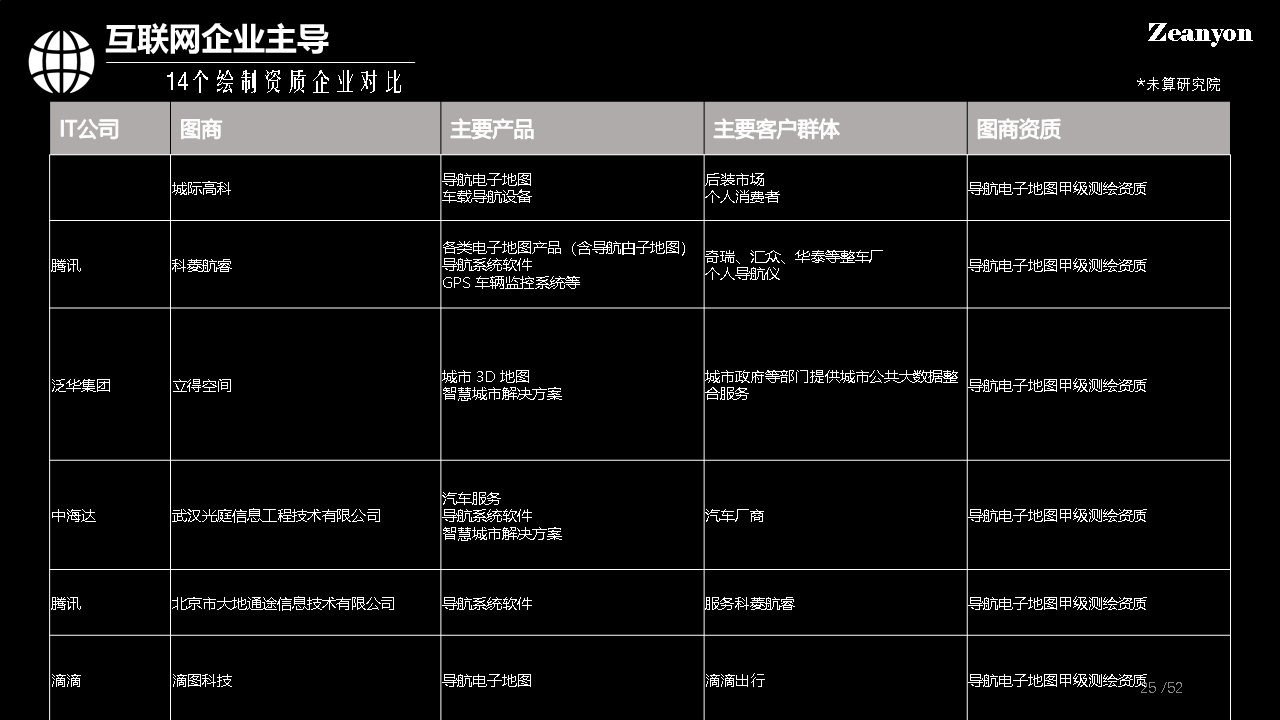
国内导航电子地图甲级资质审核未放开,地图测绘需要向国家测绘局提交甲级测绘资质,自2001 年测绘局批准四维图新拥有甲级资质以来,至今为止,只有14家图商拥有导航电子地图测绘资质。
地图涉及的国家保密性,注定决定了地图行业是寡头垄断行业,并且天然排斥外资企业的进入。在国内高德和四维图新是数字地图领域的双寡头,两者都是地图数据提供商。
- 高德地图更偏重于基于LBS(位置商业服务)的移动云联网领域,并且在移动终端也有所建树。
- 四维图新实际控制人是国家地理测绘局,拥有自己的测绘卫星,向百度地图、搜狗地图在内的各种地图应用提供地图数据,并且长期占据车载导航领域地图数据份额的50%以上。
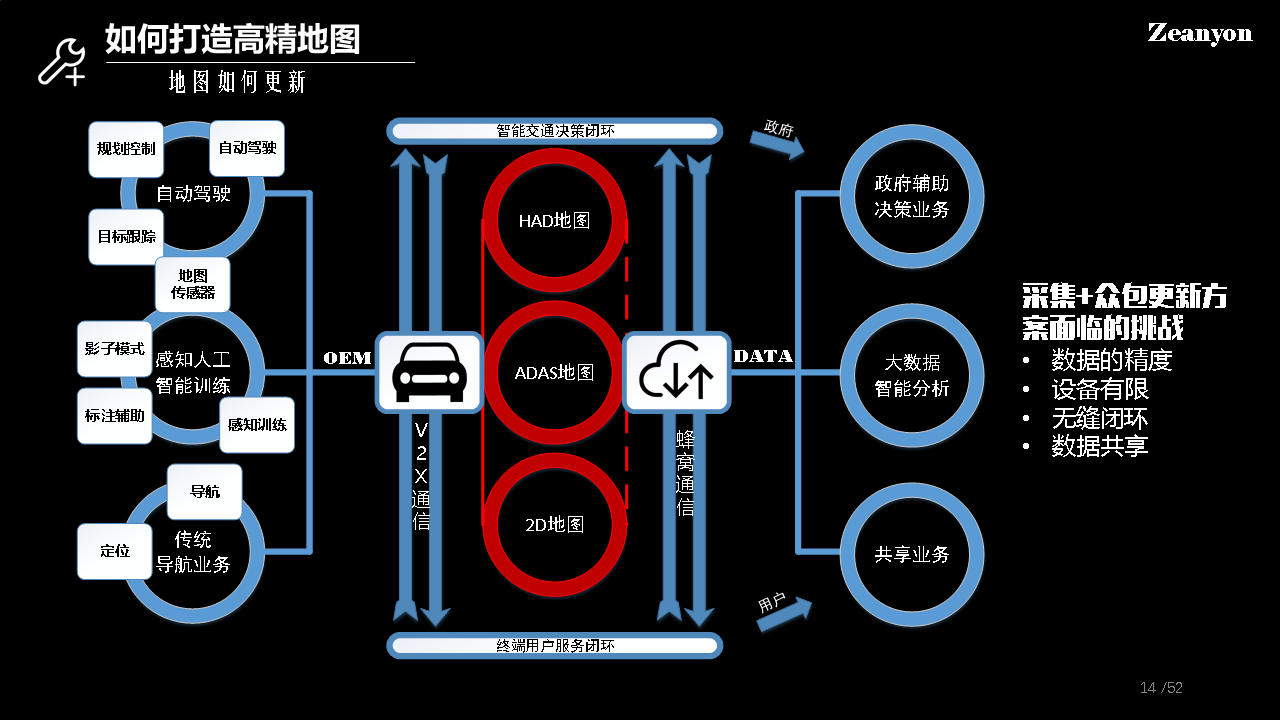
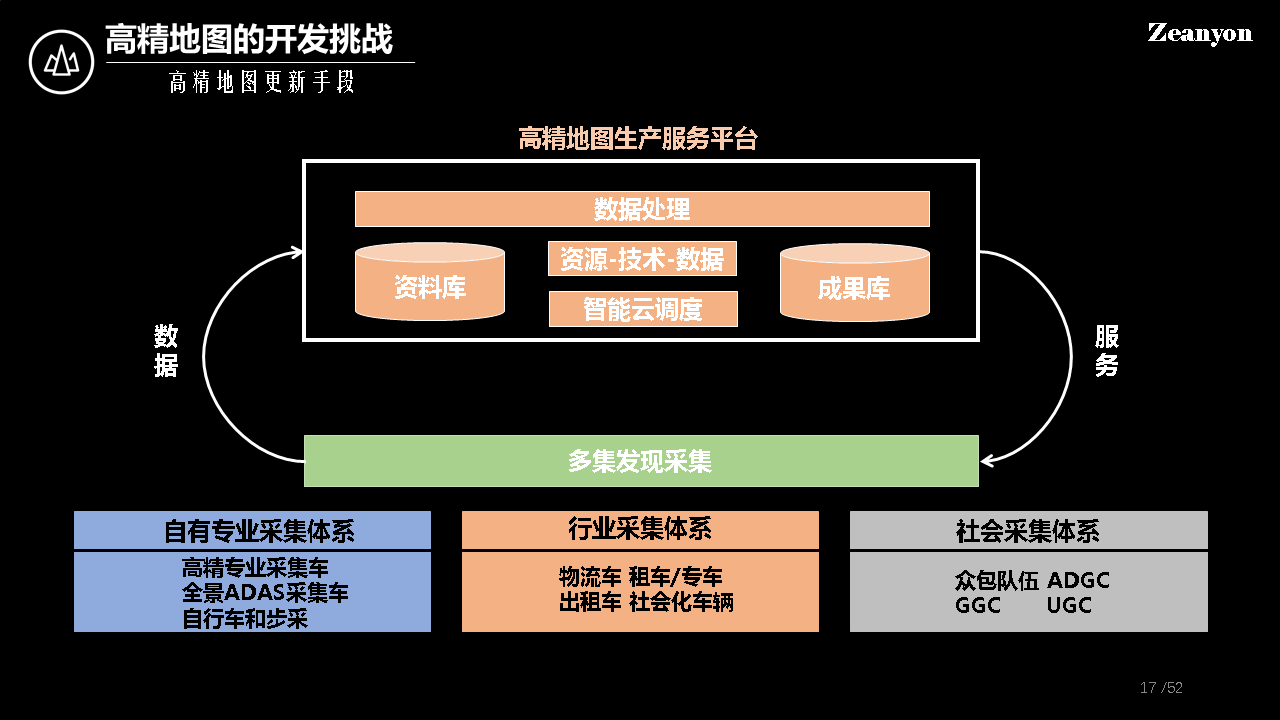
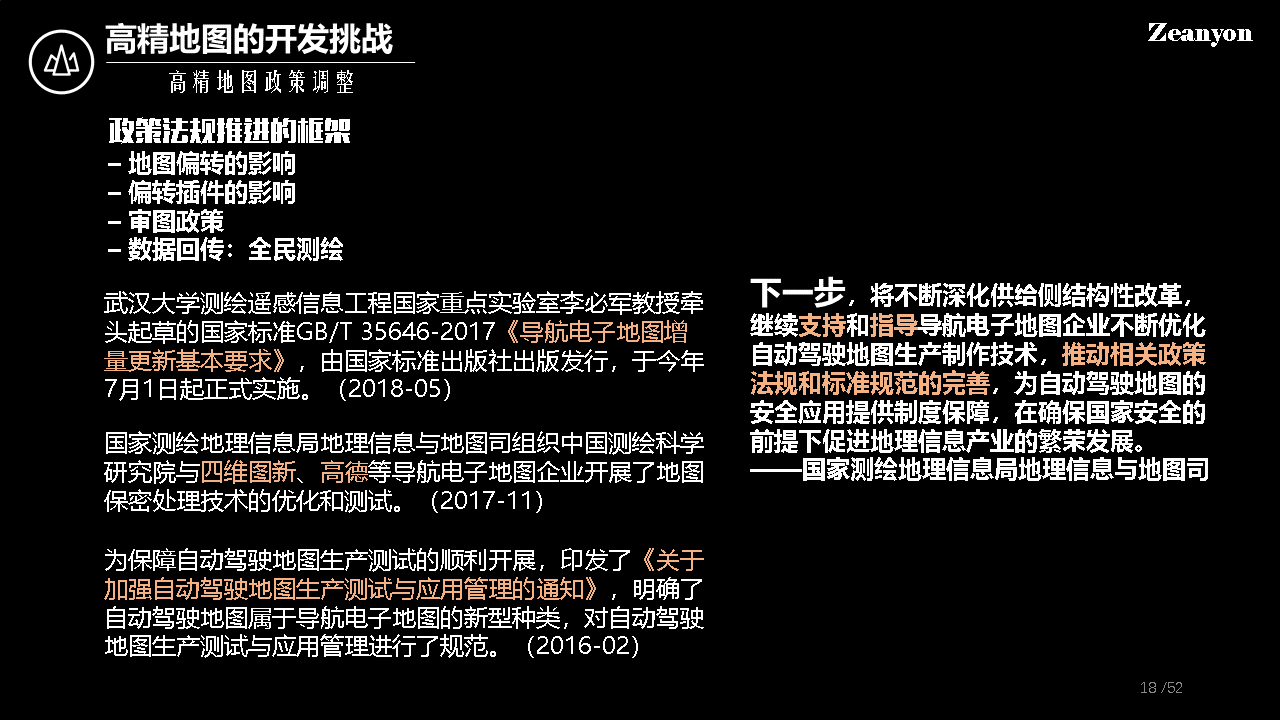
我国的汽车保有量近2亿,每年新增超过2500万辆。导航电子地图国标将于2018年7月1日正式实施,如果厂商们能够制定统一的行业标准,采用相同的数据采集格式,将数据采集开源,充分利用道路上的汽车资源,采用“众包”的方式进行数据的更新维护,实现数据的共享,这会是一种相对理想的方式。
未来靠卖数据赚钱的图商将不复存在,只会有动态大数据服务商。未来地图数据将不再是数据商品,而是行业发展共建共享的生态资源和基础设施,这对于整个地图行业的发展会是革命性的。
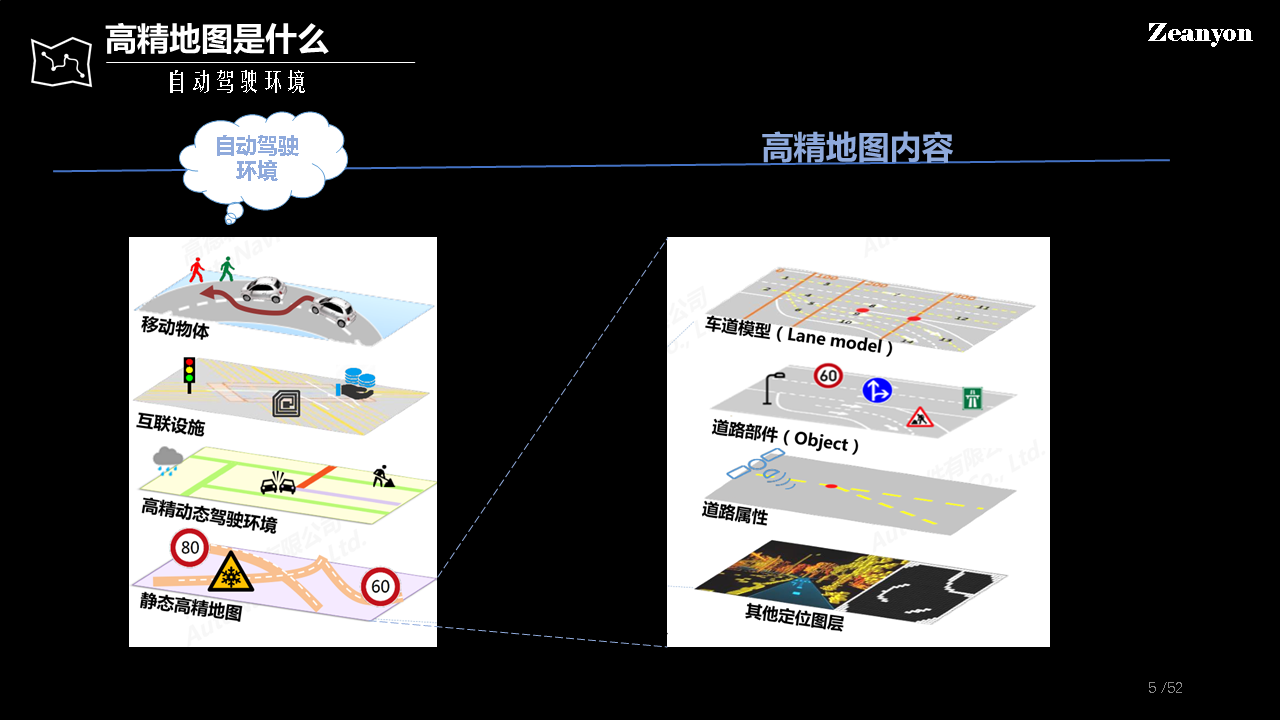
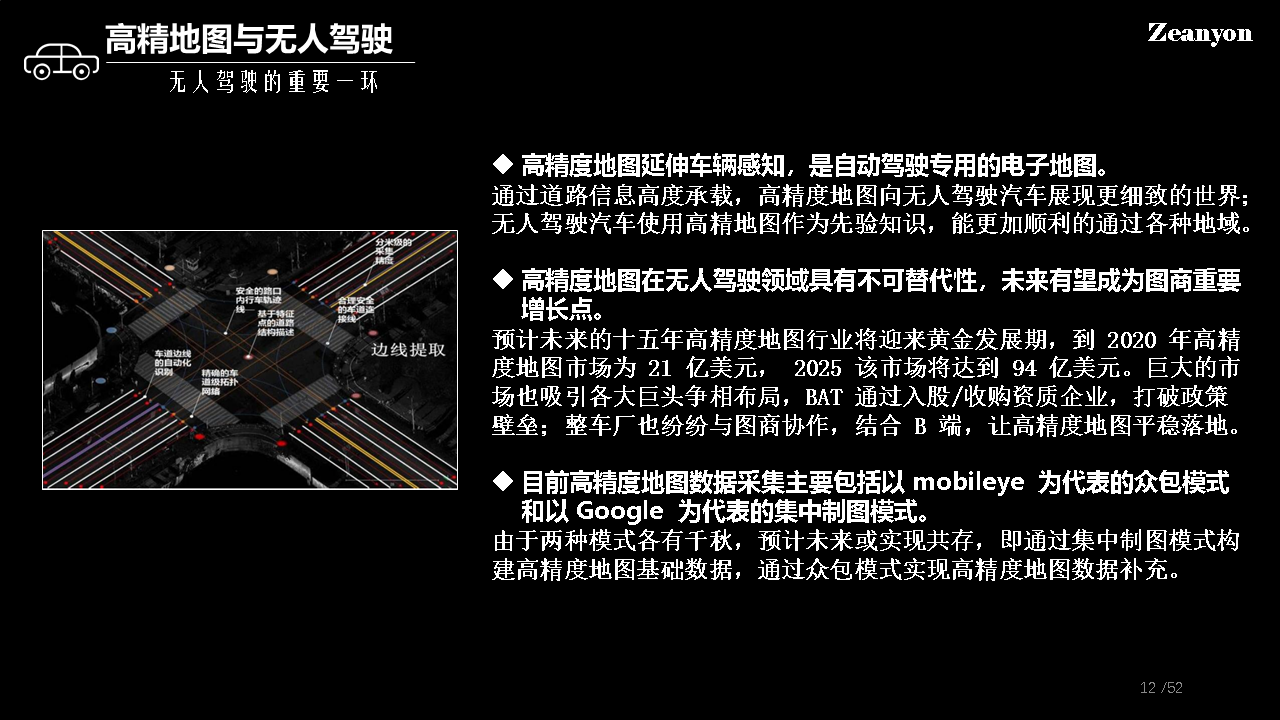
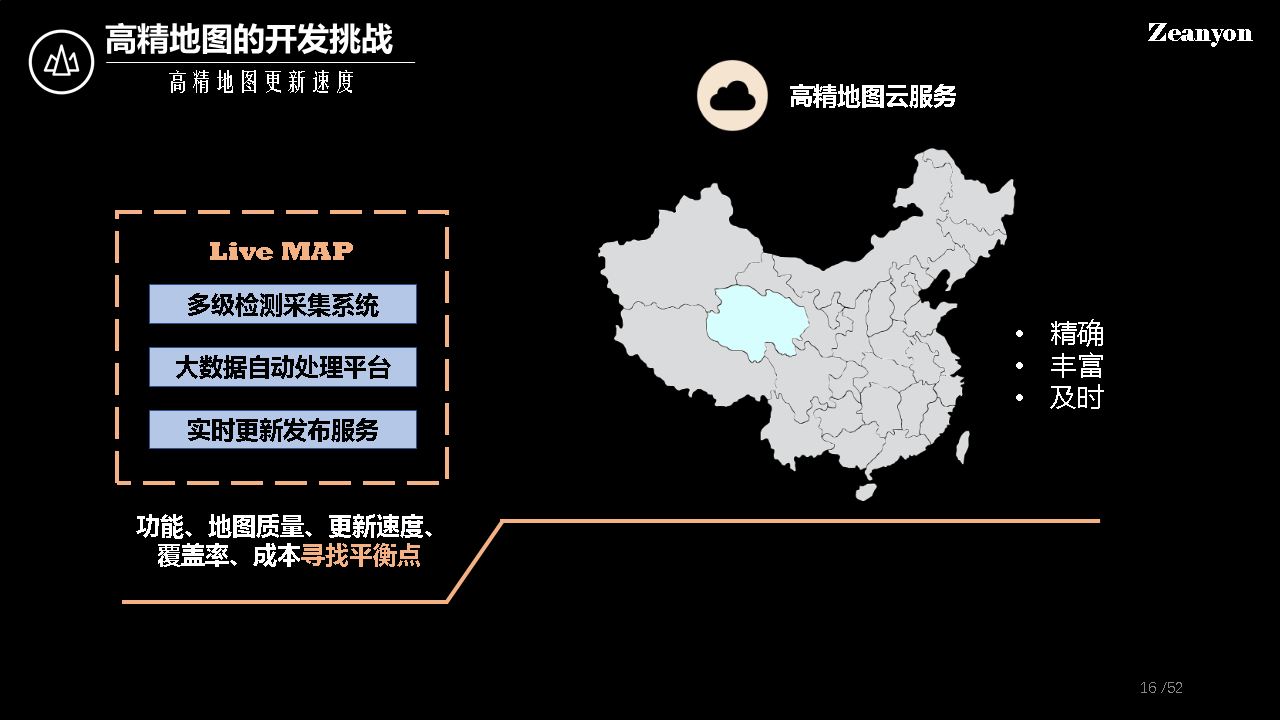
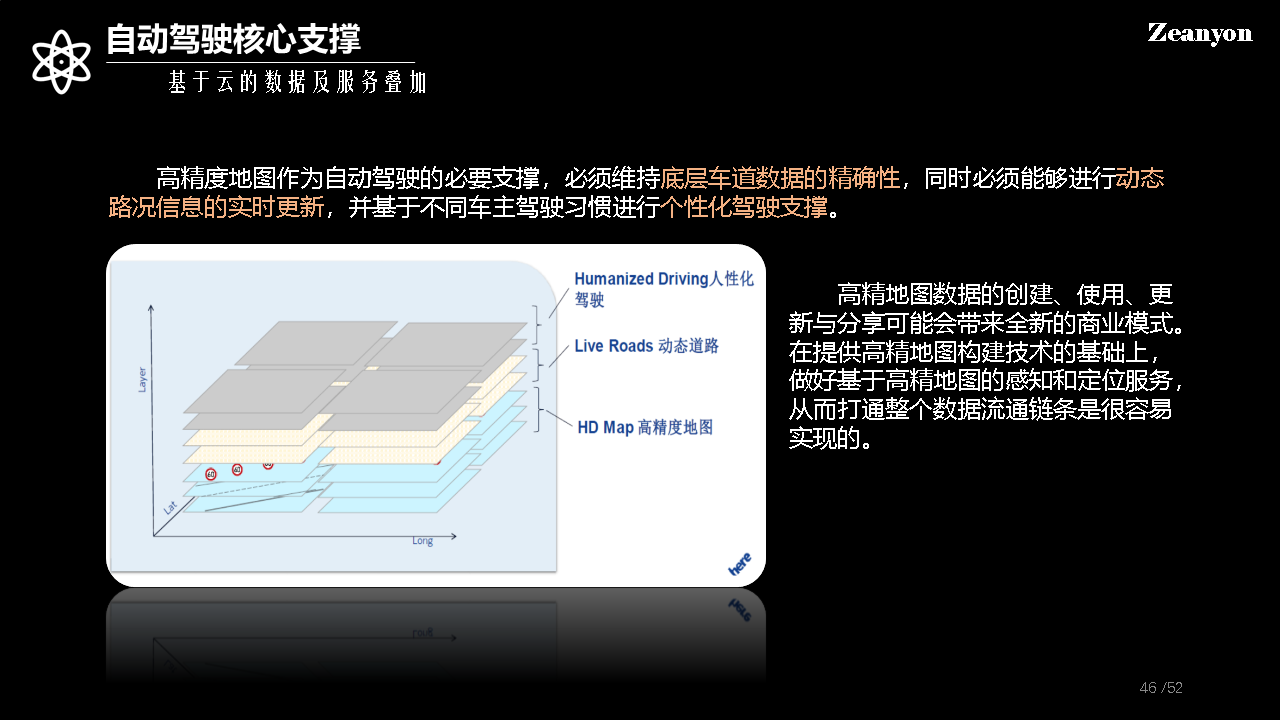
高精度地图作为自动驾驶的必要支撑,必须维持底层车道数据的精确性,同时必须能够进行动态路况信息的实时更新,并基于不同车主驾驶习惯进行个性化驾驶支撑。
高精地图数据的创建、使用、更新与分享可能会带来全新的商业模式。在提供高精地图构建技术的基础上,做好基于高精地图的感知和定位服务,从而打通整个数据流通链条是很容易实现的。
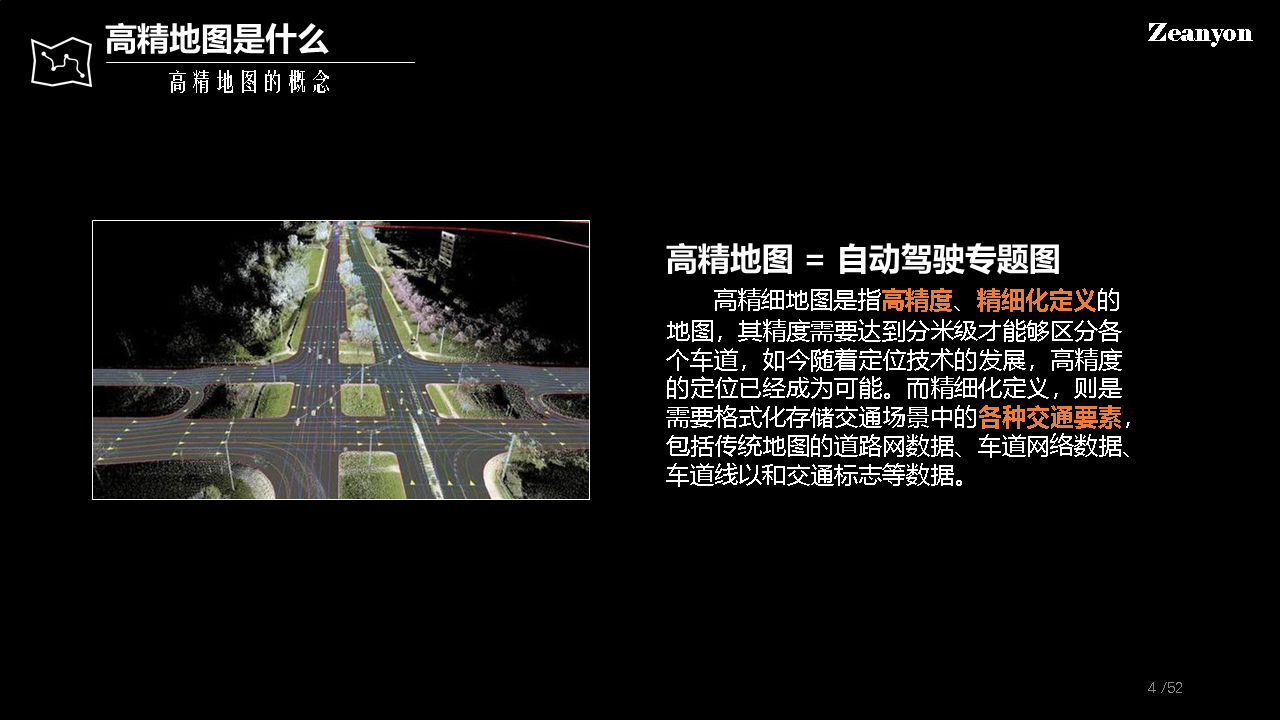
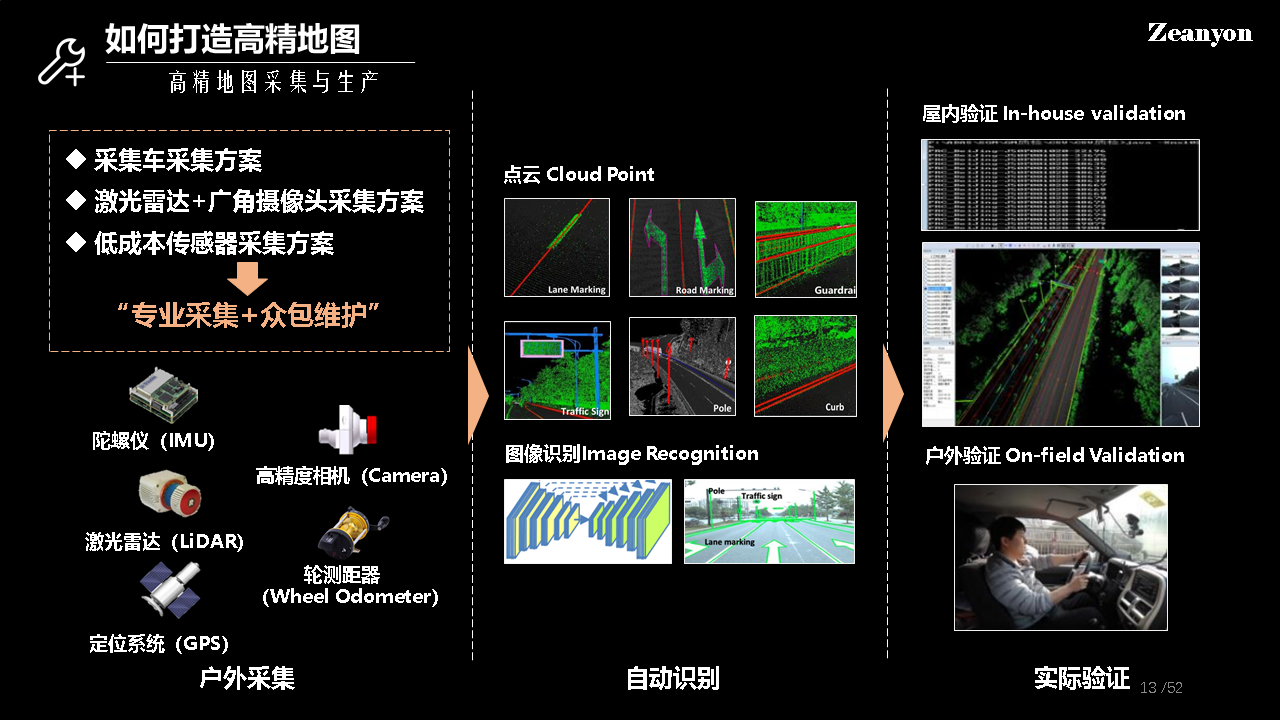
高精度地图是整体架构的底层基础 ,底层高精度地图数据主要是通过激光雷达、摄像头、以及陀螺仪等设备进行采集。
传统电子导航地图的误差通常在数米,而基于激光雷达收集的海量的点云进行的道路3D 重建,获得车道详细形状,并能够保证重建的车道宽度、位置等信息误差不超过20CM。同时,包含了人行横道、隔离带、车道线等诸多信息。
摄像头采集的道路标志等信息,经过处理之后将产生限速信息、路况标识信息。同时,结合陀螺仪等车身传感,将产生车道的坡度、弯道曲率等完善信息。
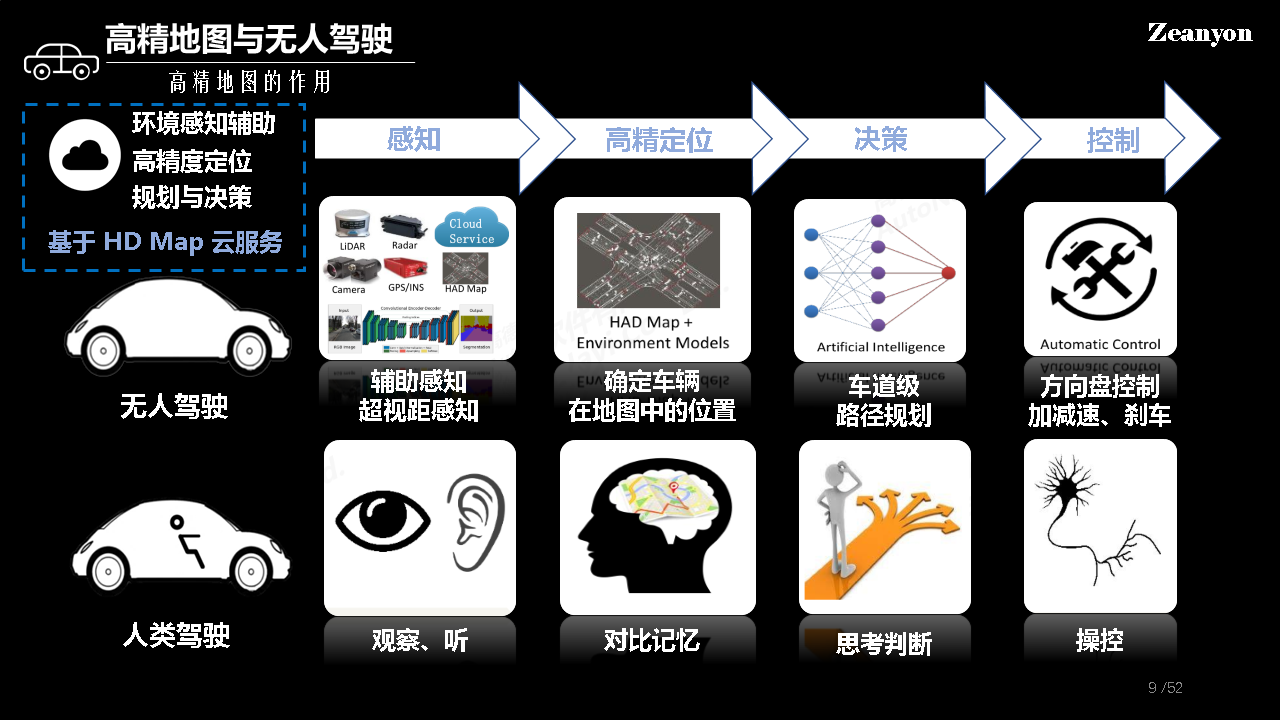
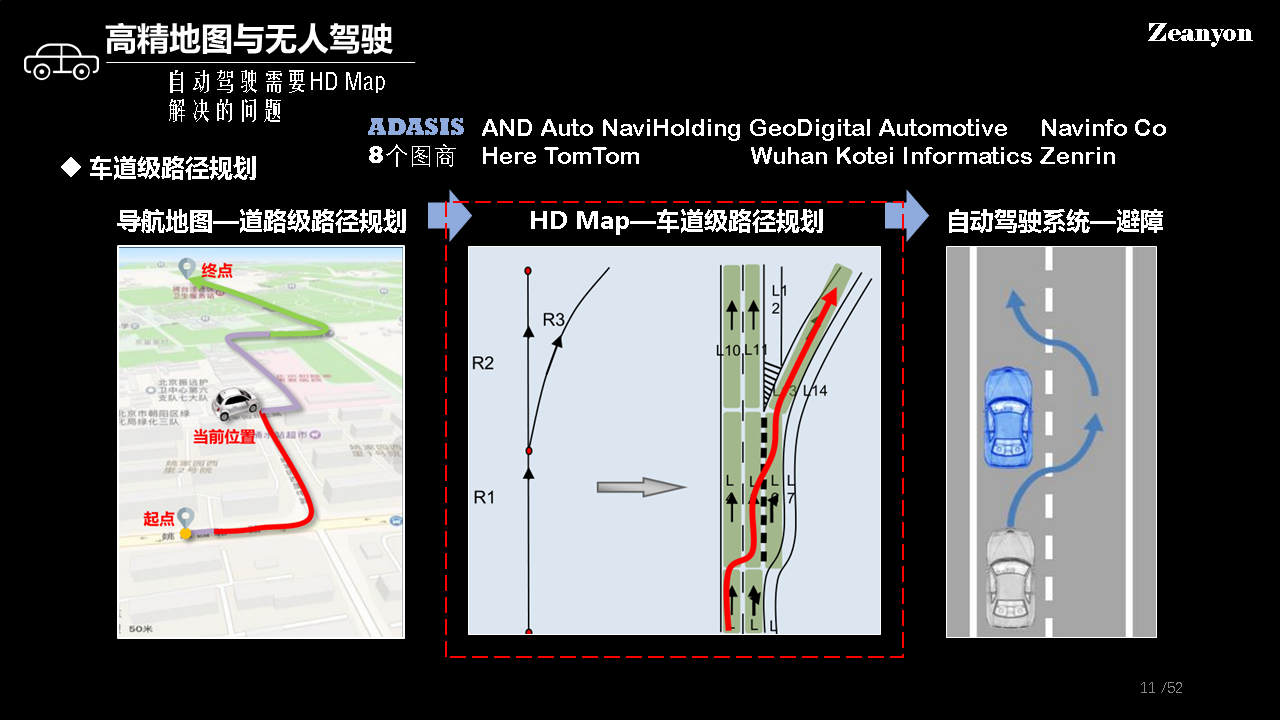
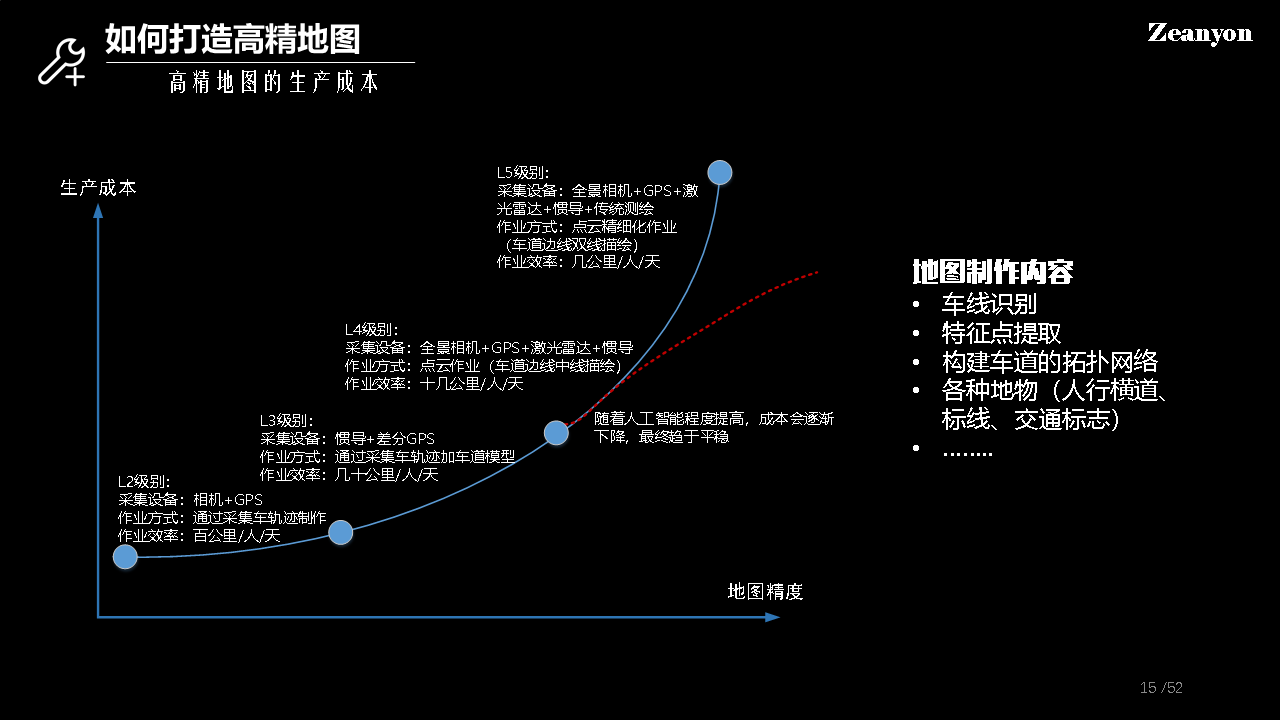
掌控全局路况信息,实现 L3 车道级规划、引导能力。最底层的高精度地图数据信息,具备了辅助完成实现高精度的定位位置功能、道路级和车道级的规划能力、以及车道级的引导能力。
在掌握全局路况信息时,自动驾驶汽车能够提前规划驾驶路径,而非在弯道前不远处进行较为紧急的制动转弯。同时,高精度地图也将对基于坡道的燃料选择,自适应前灯等诸多方面做出数据支撑,成为自动驾驶不可或缺的部分。
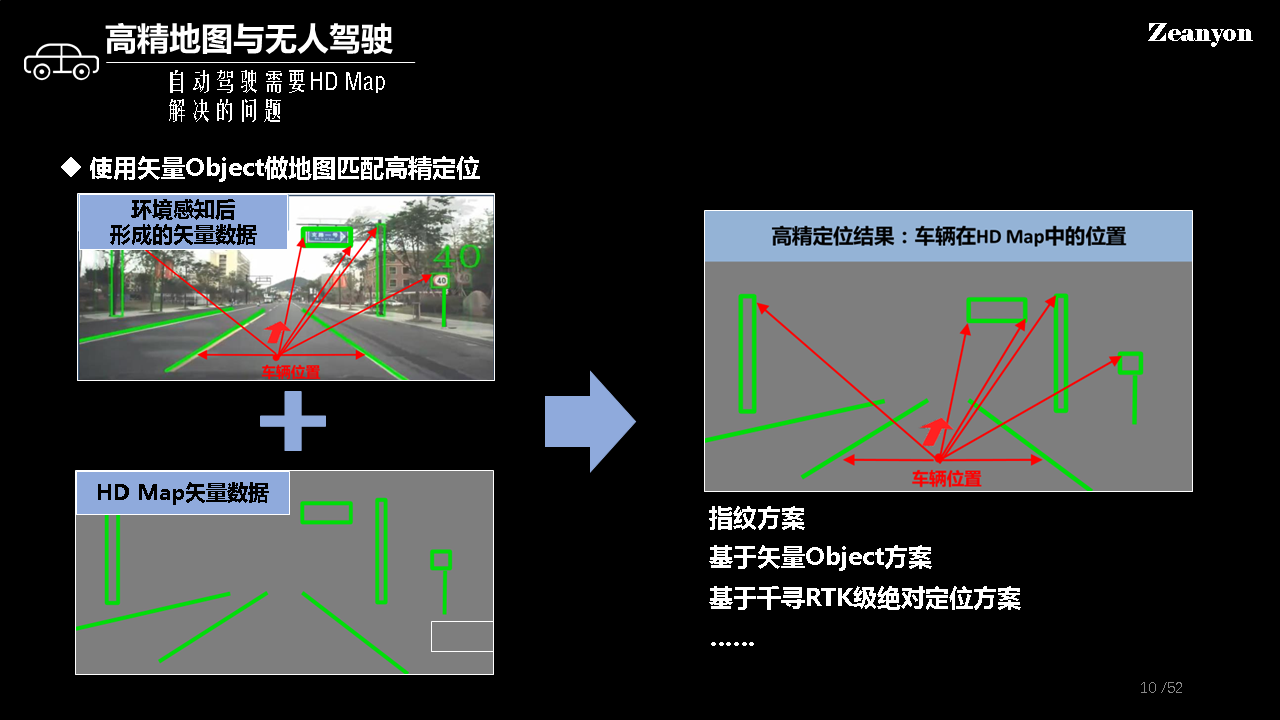
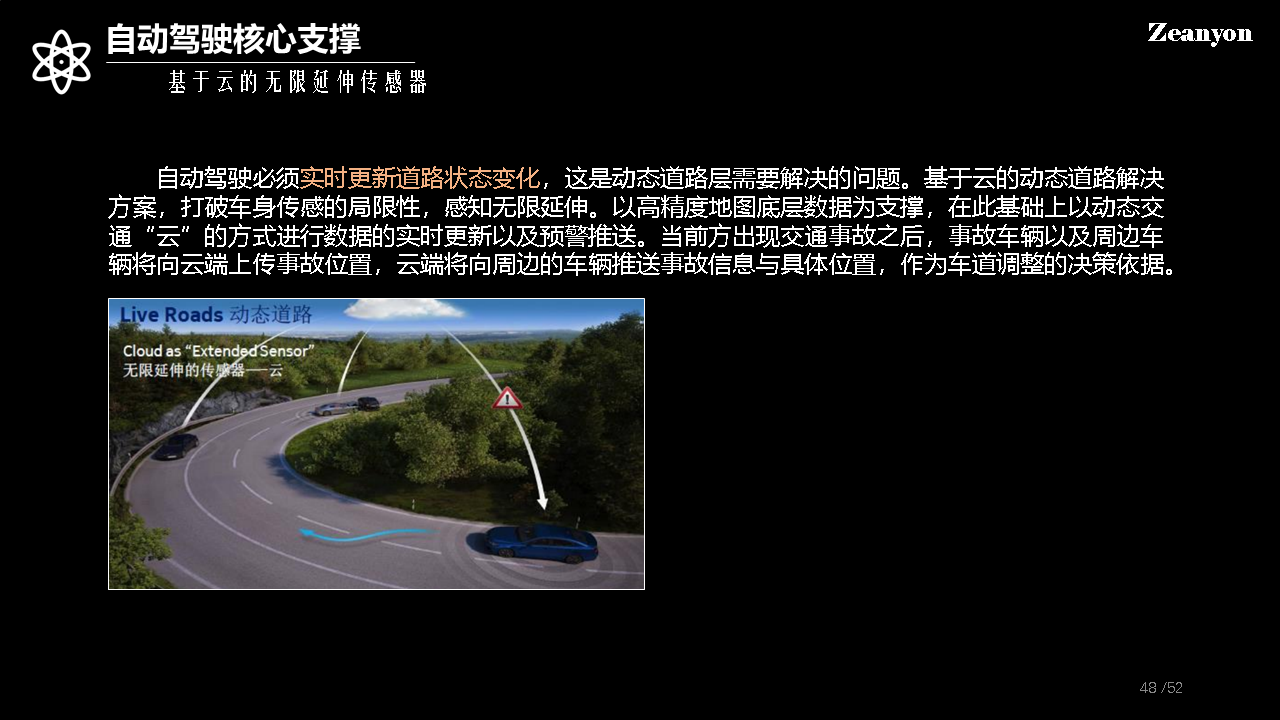
自动驾驶必须实时更新道路状态变化,这是动态道路层需要解决的问题。基于云的动态道路解决方案,打破车身传感的局限性,感知无限延伸。以高精度地图底层数据为支撑,在此基础上以动态交通“云”的方式,进行数据的实时更新以及预警推送。
当前方出现交通事故之后,事故车辆以及周边车辆将向云端上传事故位置,云端将向周边的车辆推送事故信息与具体位置,作为车道调整的决策依据。
简单来说:
- 众包模式成常态,多图商合作形态促进新的商业模式。
- 高精地图最终形态未定义,多方案解决百花齐放。
- 厘米级地图势在必行,谁先掌握谁先出线。
- 多元厂商地图制作模式向导,老图商自身优势明显,新公司技术导向弯道超车。
- 国内外图商、汽车厂商趋同,逐渐融合。
- 多产业延拓,面向V2X车联网、芯片、定制服务多向发展。
- 预计3年内形成L4级别汽车量产。
- 多政策引导,多平台放开,同步促进高精地图产业快速发展。
具体请看PPT分析:






作者:乳酸钠桢垚,生而产品(ID:PMzeanyon),分享技术、产品和运营的各种好玩的东西~
本文由 @乳酸钠桢垚 原创发布于人人都是产品经理。未经许可,禁止转载
题图来自Unsplash,基于CC0协议






- 目前还没评论,等你发挥!


