
 起点课堂会员权益
起点课堂会员权益
AI机器人交互设计模型(三):重要场景下的交互信息
 产品经理在不同的职业阶段,需要侧重不同的方面,从基础技能、业务深度、专业领域到战略规划和管理能力。
产品经理在不同的职业阶段,需要侧重不同的方面,从基础技能、业务深度、专业领域到战略规划和管理能力。
本篇文章是系列文章“机器人高效能交互模型(被CMU和NASA多次引用)”的第三篇。
在研究人与机器人的交互时,我们发现这远比研究普通的人机交互(电脑,手机)要难的多。原因主要有以下几点:
交互过程直接影响物理环境
当用户操作机器人时,其实是在操作机器人身边的物理环境,机器人的动作会直接对它身边的物理环境产生影响。交互过程中也有大量复杂的物理环境数据和信息需要被用户理解。
机器人物理功能的不确定性
当我们在手机上和电脑上进行交互,我们认为系统的响应和功能是确定的和可预期的,然而一个物理世界下的机器人有各种各样的传感器,工作过程中可能会失效或降级变弱,所以我们需要着重研究:如何能保证在机器人失去部分传感器的情况下还尽可能完成更多任务。
环境的不确定性
机器人运行的物理环境是动态的,光照强度会影响CV,灰尘过多会影响超声波,路面结冰回影响电机控制,周围建筑环境会影响wifi质量等。
并行一对多的交互关系
当人与电脑在交互时,通常一个用户只专心的与一个软件进行操作。但是当人与机器人交互时,我们的终极期望是,一个用户可以同时管理多个机器人。这种交互关系很挑战用户的short term memory。
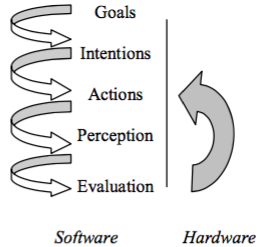
Jean Scholtz将人与机器人的交互分为以下五种经典场景,并着重分析了这五种场景如何对应Norman的Action theory。
Norman的Action theory是HCI领域的根基理论,模型化了人与计算机在交互时的七种状态:
- 生成目的;
- 生成意图;
- 规划出一系列的动作;
- 执行一系列的动作;
- 观测计算机系统的响应;
- 理解翻译系统的响应;
- 评估系统的响应是否满足了自己的目标或意图。
这七个环节是反复循环的直到用户完成或更改了自己的目的
监督管理
在“监督管理”场景下下,人与机器人的关系是远程状态下的任务监督和长期任务的制定。而在Action层面,机器人处于自己完成任务的状态。
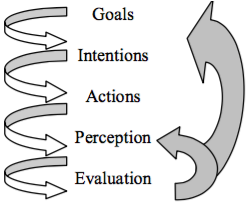
上图是“监督管理”场景下人与机器人交互的HRI模型,在这种情况下,用户需要不断的评估机器人任务完成状态是否能达到目标要求。为了让用户达到这个目的,Jean建议系统设计时至少为用户提供以下信息元素:
- 当前机器人任务的执行状态
- 整体任务种类和目的以及完成情况
- 任何可能有偏差的机器人行为
- 机器人的效率是否在下降
- 机器人与其他人之间的交互内容,包括机器人之间的交互
在“监督管理”场景下,用户的核心任务是盯着机器人不要犯错误。所以,一个要解决的问题是要告诉用户什么状态才是“正常状态”,什么状态是“快要出错的状态”,什么状态是“已经出错的状态” 另外系统需要允许用户通过设定主动警报来减少用户的记忆负担。
直接控制
直接控制模式下,用户不会改变机器人的主要任务,通常不会改变整体任务的目标和意图,而只是通过一系列的具体操作达到远程控制机器人的目的。
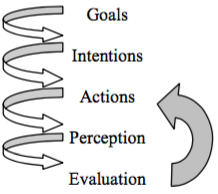
上图是“直接控制”场景下人与机器人交互的HRI模型,用户通常是具有机器人操控能力的熟练用户,通过直接控制来弥补机器人自动能力的不足。 这是HRI最传统的交互模式,即远程控制。 此外,随着机器人的能力和作用的扩大,这一角色必须能够在更复杂的情况下支持交互。在这种直接控制的场景下,Jean建议系统至少为用户提供以下信息元素:
- 机器人周边的具体环境信息
- 机器人自身的计划与安排
- 实时的机器人传感器数据
- 机器人与其他人之间的交互内容,包括机器人之间的交互
- 除了当前机器人外,其它需要用户注意力的内容
- 对机器人操作的实时反馈
- 整体任务目标,包括时间条件
在“直接控制”场景下,通常系统的通信带宽会为设计带来限制条件。设计师需要解决在有限的通信带宽下为用户呈现尽可能在此时此刻有用的交互信息。这种场景下,重复的工作也很容易让用户感到厌倦,复杂的传感器数据会增加用户的操作成本。
面对面协作
在“面对面协作”场景下,用户随时可以根据机器人的反应来调整整体目标。这就好比人与人在面对面协作的时候,沟通时通常会说高阶的目的而不是具体的指令。例如:跟我走;向左转;走到下一个路口右拐等。
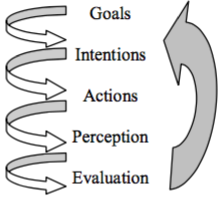
在“面对面协作”场景下,如何让用户与机器人自然的沟通就是需要解决的主要问题,Jean建议系统至少为用户提供以下信息元素:
- 机器人与其他人之间的交互内容,包括机器人之间的交互
- 机器人的实时状态
- 机器人能做出哪些动作
- 机器人可以被操控时人与机器人的最远物理距离
周边环境路人
在设计机器人时,我们不仅需要考虑机器人的操作者,还需要考虑环境中的路人。路人和机器人在同一个环境里,相互影响,不可分离。机器人的每个动作都会直接或间接的影响着路人。路人可能在园区里看到一个安防机器人巡逻,路人可能开着车和物流机器人在同一条车道上。
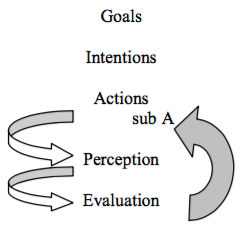
通常情况下,路人的出现会给机器人带来执行层面的轻微改动,通常会产生一个子任务,但路人的出现并不会改变机器人整体的目的和意图。这个子任务通常是“绕过”、“缓行避让”或是“对路人提供简单的服务”等。为了让路人和机器人在同一个物理环境中相互地更融洽,Jean建议系统至少为路人提供以下信息元素
- 造成机器人目前状态的原因(环境因素,路人行为,操作者行为)
- 机器人接下来的动作是什么,尤其是可能跟路人有关系的动作是什么
- 机器人的能力范围
- 机器人的能力范围中有哪些是会受到路人影响的
运行维护
在现阶段的科技和工程能力下,机器人很难做到真正意义上的稳定,所以“运行维护”在实际机器人的工作场景中会是一个至关重要的场景。这个场景的交互好坏影响了机器人长期的工作价值。在运行维护场景中,普通用户是没有能力维护软件的,所以机器人需要有对硬件进行调试,并通过软件显示出系统调试结果的能力。整体模型见下图
对于“运行维护”场景,Jean建议系统设计时至少包含以下信息元素:
- 哪个功能坏掉了,坏掉的程度是什么
- 传感器和零部件的工作信息
- 跟传感器或零部件有关的软件设置
对于“运行维护”场景,我们需要特别考虑的一个点是,机器人需要一个“off-line”模式用来进行维修和调试。如何让操作者知道更多关于机器人的信息呢?是否需要一个外接显示屏能讲机器人内部信息可视化?这些问题值得思考。
本系列文章部分借鉴Olsen与Goodrich的经典论文“Metrics for Evaluating Human-Robot Interactions” 以及Scholtz 的“Theory an Evaluation of Human Robot Interaction”.笔者是欧盟创新技术院HCI专业,最近在创业做低速自动驾驶。在读CMU和NASA的文章时发现这片论文被多次引用提及。仔细研究后发现字字干货,于是吸收整理后输出给大家。
相关阅读
作者:石大大,知乎:石大大,微信公众号:Thirsty
本文由 @石大大 原创发布于人人都是产品经理。未经许可,禁止转载
题图由作者提供
















大大好,客服类型的机器人,如何能提升用户对机器客服的接受度呢?求回复~